Course contents(1/4)
Getting Started with ROS 2
Lesson 1.1 — What is ROS 2 (and Why It Matters)
10 min readWhat you'll learn
What ROS 2 really is (hint: it is not an operating system)
The "monolith problem" and how ROS 2 solves it
The core capabilities ROS 2 gives you for free
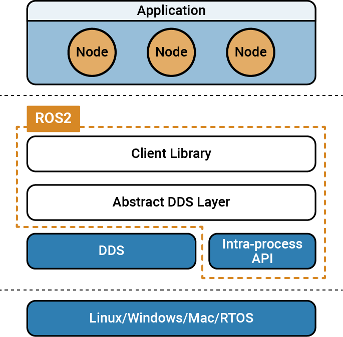
ROS 2 is a framework, not an OS
ROS stands for Robot Operating System, but that name is misleading. ROS 2 is not an operating system like Windows or Linux. It is a middleware framework — a collection of tools, libraries, and conventions that sit on top of your real operating system and help you build, run, and scale robot software.
Out of the box (or through well-supported community packages), ROS 2 gives you:
Simulation — test robots without hardware
Motion planning — figure out how an arm or robot should move
Navigation — move a robot from A to B while avoiding obstacles
Manipulation — pick up and move objects
Perception — make sense of cameras, LiDAR, and other sensors
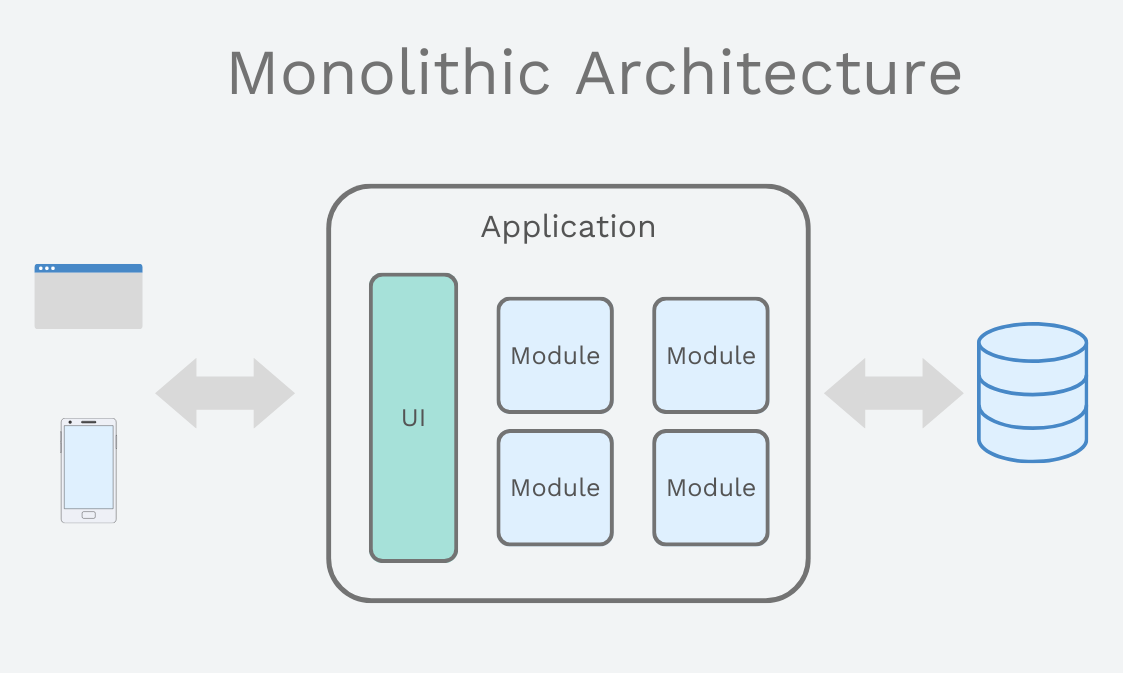
The "Monolith Problem"
You can write a single Python script that moves a robot. In the real world that script fails, because it is a monolith.
Monolith: an entire application built as a single, unified, self-contained unit — rather than as a collection of smaller, independent services.
If any one part of a monolith crashes, the whole robot stops. That is dangerous for a 50 kg machine moving through a room.
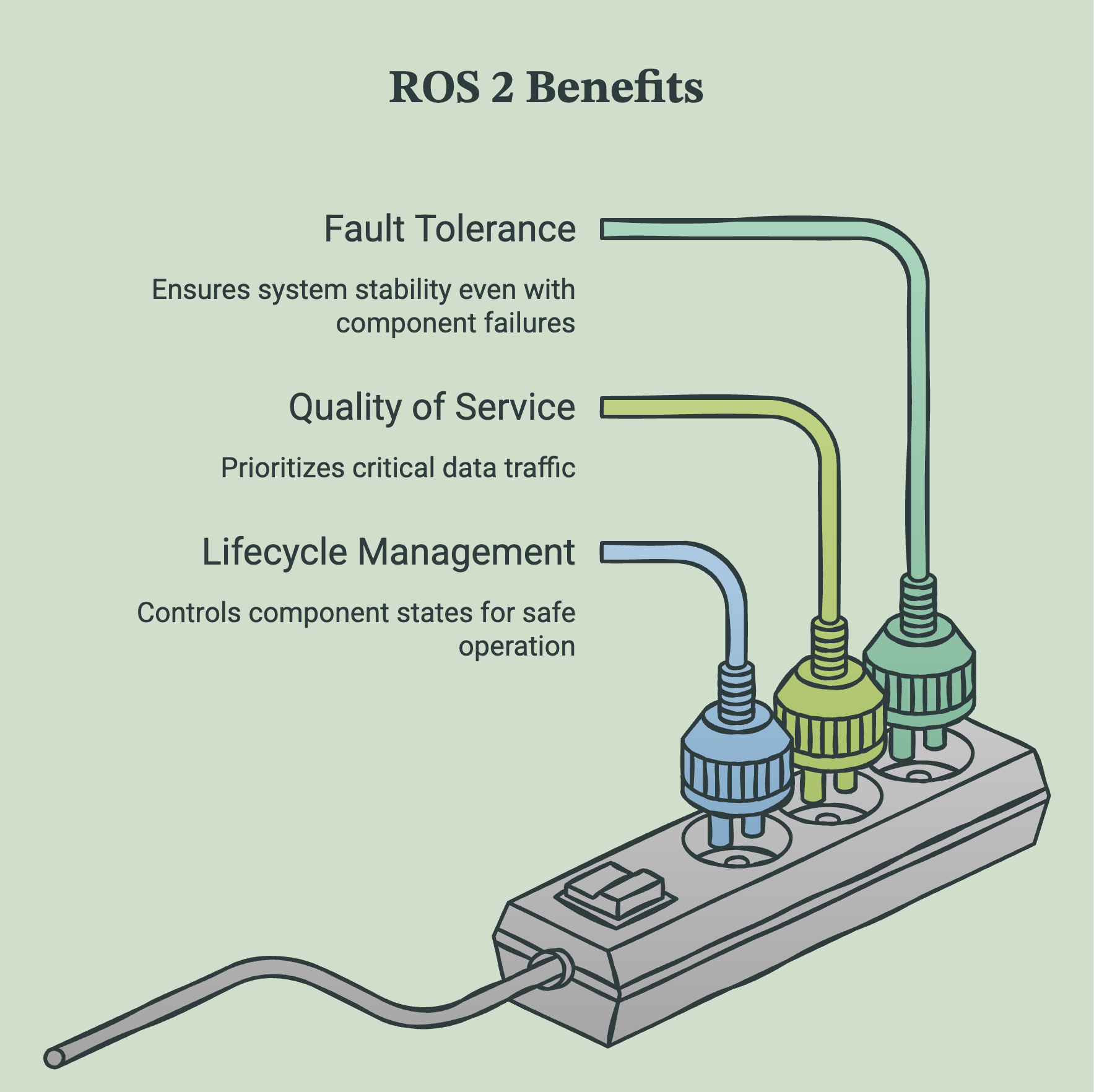
ROS 2 solves this by splitting your robot into many small, independent programs that talk to each other. This gives you three big wins:
1. Fault tolerance If your Object Detection program crashes, your Safety / Braking program keeps running. The system doesn't die — it degrades gracefully.
2. Quality of Service (QoS) You can prioritize different kinds of traffic:
Sensor data → "best effort" (dropping one LiDAR frame is fine)
Control commands → "reliable" (dropping a Stop command is catastrophic)
3. Lifecycle management ROS 2 programs follow a strict state machine. A robot component doesn't just "turn on" — it goes unconfigured → inactive → active. This stops a robot from moving before its sensors are calibrated.
Recap
ROS 2 is a framework / middleware, not an operating system.
It splits a robot into small independent programs so one failure can't kill the whole system.
QoS lets you treat "stop the robot" differently from "here's a camera frame."